Surveying System
Responsible Techician: Huan-Jie Shao
Single Beam Multibeam Sub-Bottom Profiler USBL
|
|
Quantity: 1
Supplier: KONGSBERG Model: EA640 Features: The main components include a transducer, a transceiver unit, and a recorder. The principle involves transmitting a sound wave towards the seafloor, which upon reaching the seafloor, reflects back to the transceiver unit on the vessel. By calculating the time difference, the depth of the seafloor can be determined.
Frequency and the Corresponding Precision: 38 kHz-4.8 cm / 12 kHz-19.6 cm Measurement Maximum Depth: 3000 m Datasheet: Link OEM Installation Maunal: Link OEM Manual: Link OEM Link: Link Basic operation: Link
|
|
|
Quantity: 1
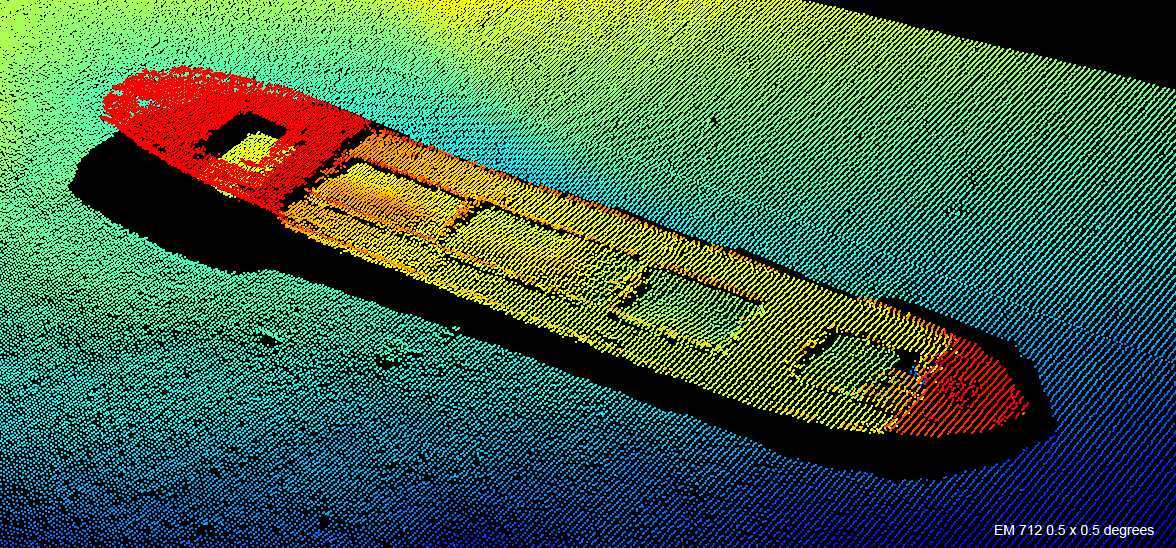
Supplier: KONGSBERG Model: EM712 Features: This tool emits multiple fan-shaped sound waves (ranging from hundreds to thousands), calculates the time required for the sound waves to travel to the seafloor or target object and reflect back, thereby obtaining the distance traveled by the sound waves, and consequently obtaining information about water depth. Compared to single-beam echosounders, this tool has a wider coverage. Measurement Maximum Depth: 3600 m Datasheet: Link OEM Installation Maunal: Link OEM Manual: Link OEM Link: Link Basic operation: Link
|
|
|
Quantity: 1
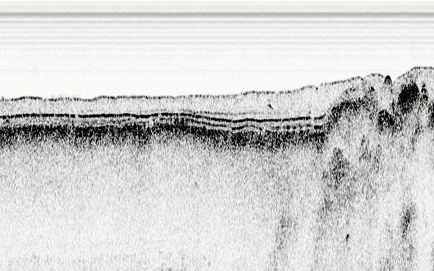
Supplier: EdgeTech Model: 3300 Features: The imaging principle of the stratum analyzer relies on the variation in amplitude and phase of reflected wave energy when sound waves propagate through different media beneath the seafloor. The receiver captures these variations, records them, and then generates profile images. Measurement Frequency: 2~16 kHz Measurement Maximum Depth: 5000 m Datasheet: Link OEM Manual: Link OEM Link: Link Basic operation and data presentaion: Link
|
|
|
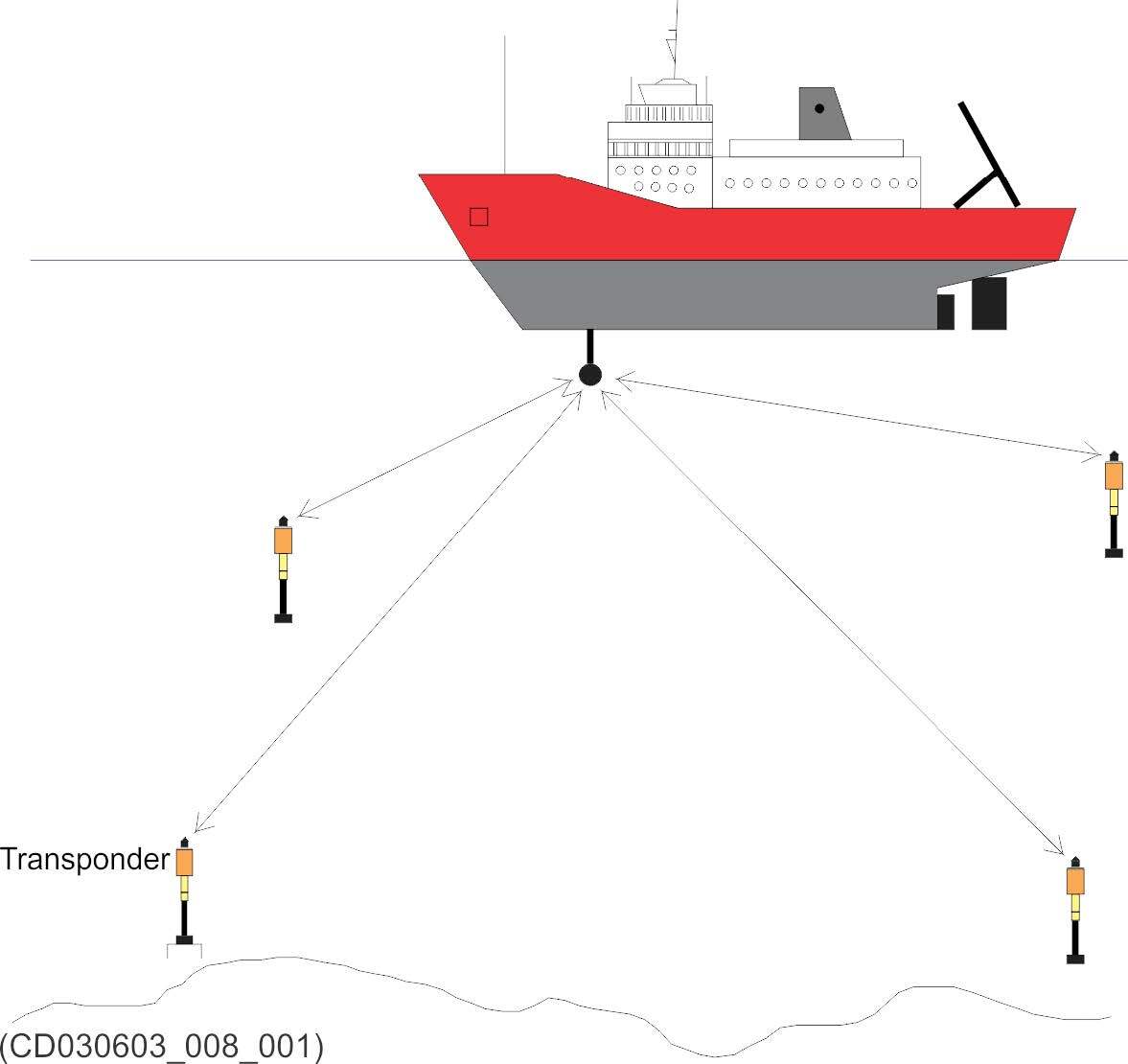
Quantity: 1
Supplier: KONGSBERG Model: HiPAP 502 Features: By measuring the time difference between the signal transmitted from the hull-mounted transducer and the reply from the transponder, the slant range between the transducer and the transponder can be determined. By combining the slant range, bearing and pitch angle, the relative position of the transducer with respect to the transpondercan can be calculated. Measurement Maximum Depth: 13000 m Product Description: Link OEM Manual: Link OEM Link: Link |